BAGHDAD-ADS: Benchmark Dataset for Baghdad Adverse Driving Scenes
BAGHDAD-ADS is a curated dataset of real urban driving scenes captured in Baghdad, Iraq. It is designed to support image enhancement and autonomous-driving perception research under challenging visual conditions, including night scenes, headlight glare, rain streaks, rain smear artifacts, and fog.
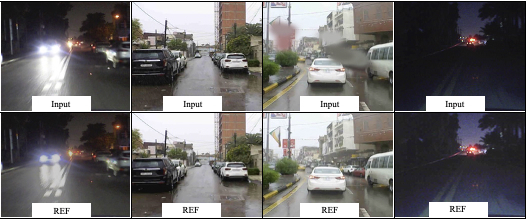
Dataset Samples
Sample visual conditions from BAGHDAD-ADS, including night, nighttime glare, rain streaks, rain smear artifacts, and fog scenes collected from Baghdad roads.

Prepared by:
Yousif N. Abbas
AI and Computer Vision Researcher specialized in image enhancement and autonomous driving systems.
Visit ProfileDataset Information
| Weather Condition | Number of Samples |
|---|---|
| Rain Streaks | 4,434 |
| Nighttime Glare | 667 |
| Night | 4,921 |
| Fog | 500 |
| Rain Smear | 11,521 |
How to Get Access?
Paired Dataset Samples
The BAGHDAD-ADS dataset provides unique paired driving sequences to facilitate advanced research in computer vision and image restoration. Each sample includes degraded input scenes captured under adverse environmental conditions such as heavy fog, torrential rain, and low-light night driving, matched perfectly with high-quality reference/ground-truth images. This pairing is essential for training and evaluating supervised deep learning models focused on dehazing, deraining, and low-light enhancement.
Citation
If you use this dataset in your research, please cite the following publication:
@article{abbas_uwunet_2026,
title={Unified Wavelet U-Net with Bottleneck Classification for Adaptive Image Enhancement in Autonomous Driving Systems},
author={Abbas, Yousif Neamah and Abdulmunim, Matheel Emaduldeen and Ali, Nada Hussain and Ahmad, Musheer and Abdel Mageed, Ismail},
journal={International Journal of Intelligent Engineering and Systems},
volume={19},
number={6},
pages={105--126},
year={2026},
doi={10.22266/ijies2026.0630.07},
url={https://inass.org/wp-content/uploads/2026/03/2026063007-2.pdf}
}